|
Intro
The final project for the Wonderneers, had the team of students create a product that could clean paintbrushes. Historically, many users waste money throwing away used paintbrushes due to the paint hardening on the bristles and general lack of care. Furthermore the current models that existed for cleaning paintbrushes were - while cheap, a non-user-friendly experience and in some extreme cases, a potential hazard when using. Thus, Wonderneers took it upon themselves to create a electrical paintbrush cleaner that would utilize a gear motor and spring encased in a tank that would have the user simply flick a switch to turn on and off the product and have no risk of getting wet or having their brushes harmed. Components The product involved the following components (with quantity included): Battery Holder -1, Large Gear -1, Bracket -1, Tank -1, Gear Rod -1, Gear Motor-1, Lid-1, Small Gear-1, Sponge-2, Spring-1, Toggle Switch-1 Concept Generation to Alpha Prototype The first assignment given to this project was in our three needs presentation, where Wonderneers began to formulate the product in mind and create a starter list of functional requirements. Possible solutions that were considered were creating a clamping mechanism or brush pad that focused on being able to create a housing unit where users would be able to remove the paint whether by soaking in a solution and/or swiping it clean. After the three needs, the team began to create our pugh & FRSARC charts in preparation for our sketch model presentation. The team was focused on the clamping mechanism and debated on using a crank, servo, spring, or holed mechanism to create the model with. Criterion that were considered included, ease of adjustment, ease of manufacturing, complexity for course purposes, and clamping brush removal. The risks that the team considered included electrical failures or fires if we were to pursue an electrical model, or improper fittings due to not being able to perfectly adjust for every type of brush. Countermeasures included proper wiring, housing size, and leak tight tolerancing. In then end, the decision made for the sketch model was to pursue a servo based clamping product, where the clamping brushes would essentially serve as a vise and the user would be able to insert the brush into the tank that held the correct cleaning solution, and the model would have a force sensor attached to it, so that the user would be notified when the clamping brushes were in place for cleaning. After the brush had been soaked for a predetermined amount of time, the user would then simply lift the brush out, and the clamping brushes would remove the paint. In addition, the model included features such as a removable clamping brush due to a slot mechanism incorporated, as well as a detachable tank. However, after using our sketch model in a test run to clean the paint off, it was clear that simply clamping the brush and lifting in one motion was enough to clean the paint off. Thus the team needed to create a new design concept in preparation for the critical function. The research that came to the critical function involved incorporating a spring and motor to the table. A few Wonderneer members went to a art store (Blick Art Materials) and talked to experts there about paint and paint removal. According to them, most artists used a coil and solute due to being able to spread the bristles apart for easy cleaning. Thus the team settled on creating a self rotating cleaning coil that would remove the pigment attached deeply in the brush. Furthermore, it would stimulate and improve the quality of cleanliness on the brush. Side research was also done on various solvents and brushes that were optimal for cleaning. The Wonderneers approached a paintbrush store online with inquiries towards cleaning approaches. When picking a motor that would be spinning our gear assembly, the team picked a motor that would spin at 35 RPM so that the speed would not be great enough to leave splashback. Further analysis on the motor and spring can be found on the ‘Analysis’ section. Creating the critical function model included a majority of the components reflected in the alpha prototype. The gears, motor, tank, brushes, and spring are the critical components of the model. When tested, the model was able to properly clean the brush. When the engineering drawings in preparation had been inspected, the feedback we received, in addition to our critical function model, was to make sure everything was encapsulated and involved a switch for a more ‘bam’ effect. Thus the team focused its efforts on making a lid and tank that would fit within each other so that the user should only see the rotating spring for him/her to insert the brush into. |
Analysis
If there are any additional analyses Wonderneers would do, it would involved further research onto the shelf life/battery life of the final product
0.051 in = wire diameter | 1.0625 in = outer diameter (D) 4.125 in = free length | 0.232 in = pitch Shear Modulus (G) = 11.2E6 psi Number of Active coils (n) = 21 Spring Constant Formula =k= Gd^4 / 8D^3n = 0.376 lb/in Angle of Spring Coil = inv tan (pitch/𝛑D) = 4 degrees
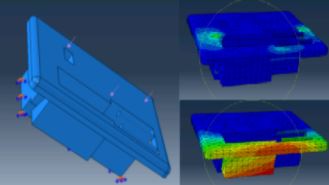
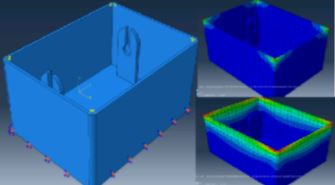
For the tank, a thickness of 0.25 in and polylactide material (PLA). As a reference the Ultimate Tensile Strength (UTS) of PLA is roughly 7.3E3 psi at room temperature. The loading conditions were to have the bottom of the tank fixed and the corners on the lip pushed inwards with 5 lbf on each node. This was to simulate as if the user is carrying the tank by the corner. The results showed that the max stress was well under UTS at 800 psi telling the group that it was ok the proceed with our current sizings and material selection. For the lid, a pressure simulation of 10 psi the team fixed the bottom again, but this time, evenly distributed the force on the top of the tank, to observe where the highest points of stress would be. High stresses were located near the edge of the opening where the user would insert the brush which is to be expected. Still the results still showed that the max stress was below UTS at 5.624E3 psi.
Results Once the lid and tank had been 3D printed, a mistake had been noted where the gap between the lid and tank was too close where the spring’s rotation interfered by making contact with the lid. Another issue arose where the lid and tank did not fit correctly. The problem was resolved by sanding down the areas where tolerancing was off and by incorporating spacers between the lid and tank. Once the components had all been assembled, additional features such as the stickers were incorporated for an easier user-interface. The final list of functional requirements for the Wonderneers came as such:
|